Водолазная электроника
В настоящее время созданы малогабартные ГАЛ для водолазов и ПСД массой 3 – 5 кг. На глубинах более 50м они работают как относительные (измеряют скорость относительно нижних слоёв воды), что несколько снижает точность их показаний.
(БИНС) это новый вид инерциальных приборов, имеющих малые габариты и позволяющих выдавать координаты водолаза или ПСД в трёх плоскостях. 2.1.2.4. Бесплатформенные инерциальные системы
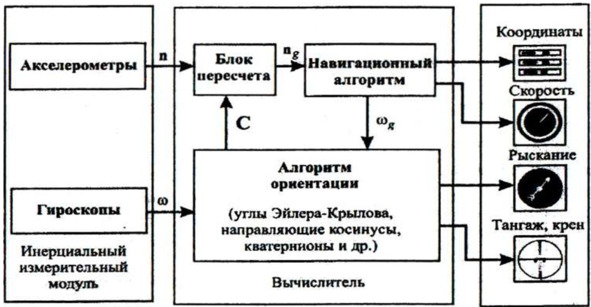
Основа БИНС это блок чувствительных элементов, состоящий из 3-х ортогонально расположенных гироскопов (датчиков угловой скорости) и 3-х ортогонально расположенных акселерометров.
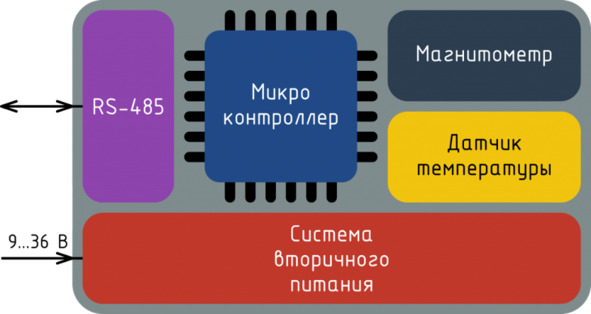
Блок-схема БИНС представлена на рис. 12.
Рис. 12. Блок-схема бесплатформенной инерциальной системы.
В бесплатформенных инерциальных навигационных системах нет подвижных деталей. Сам гироскоп, можно сказать, трансформировался в электровакуумный прибор.
В настоящее время гироскопы есть лазерные, волоконно-оптические, волновые твердотельные, микро-механические. Какой из них самый совершенный – это вопрос удовлетворения требований потребителя к точности формирования навигационной информации. Чем ниже точность и проще технология, тем дешевле БИНС.
Есть и другие типы гироскопов, которые еще не достигли технологического совершенства и не используются индустриально, например, СВЧ, ядерный магнитно-резонансный (рис. 13.), гироскоп на холодных атомах и другие.
Рис. 13. Гироскоп на базе микроядерного магнитного резонанса (рядом монета).
Современный БИНС на лазерных гироскопах и кварцевых акселерометрах является одним из наиболее сложных, дорогих и высокотехнологичных изделий авиакосмической промышленности.
Разработкой БИНС авиационного применения в России занимаются ряд организаций, в том числе и Московский институт электромеханики и автоматики (МИЭА), входящий в КРЭТ. Причем БИНС только этого института принят в серийное производство. Системы навигации на лазерных гироскопах и кварцевых акселерометрах, разработанные в МИЭА входят в состав комплексов бортового оборудования современных и перспективных самолетов гражданского и военного назначения.
Кольцевые лазерные гироскопы и кварцевые акселерометры сегодня – самые точные и наиболее распространенные в мире.
Принцип действия лазерного гироскопа заключается в том, что внутри замкнутого по периметру пространства, образованного системой зеркал и корпусом, изготовленным из специального стекла, возбуждаются два лазерных луча, которые по каналам идут навстречу друг другу. Когда гироскоп находится в состоянии покоя, два луча «бегут» навстречу друг другу с одинаковой частотой, а когда начинает совершать угловое движение, то каждый из лучей изменяет свою частоту в зависимости от направления и скорости этого движения.
Через одно из зеркал выводится часть энергии лучей и формируется интерференционная картина. Наблюдая за этой картиной, с помощью фотоприемника считывают информацию об угловом движении гироскопа, определяют направление вращения по направлению движения интерференционной картины и величину угловой скорости по скорости ее движения. Фотоприемник преобразует оптический сигнал в электрический, а дальше начинаются процессы его усиления, фильтрации и отделения помех.
Сам гироскоп одноосный, он измеряет угловую скорость, действующую вдоль его оси чувствительности, которая перпендикулярна плоскости распространения лазерных лучей. Поэтому система состоит из трех гироскопов. Для получения информации не только об угловом, но и о линейном движении объекта в системе используются три измерителя ускорения – акселерометра. Это очень точные приборы, в которых на упругом подвесе в виде маятника подвешивается пробная масса. Современные акселерометры осуществляют измерения с точностью до одной стотысячной доли ускорения свободного падения.
Опытный образец новейшей бесплатформенной инерциальной навигационной системы БИНС-2015, способной работать без связи с GPS и ГЛОНАСС, весьма длительное время уже готов и прошел все испытания.
БИНС способна определять местоположение летательного аппарата автономно, без использования спутниковой навигации и связи с наземными объектами. Она может в условиях отсутствия сигналов извне определять координаты и параметры движения объекта, на котором установлена. При этом учитываются воздушные течения и перепады высоты.
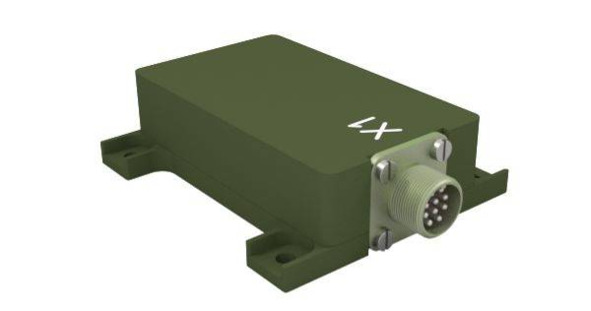
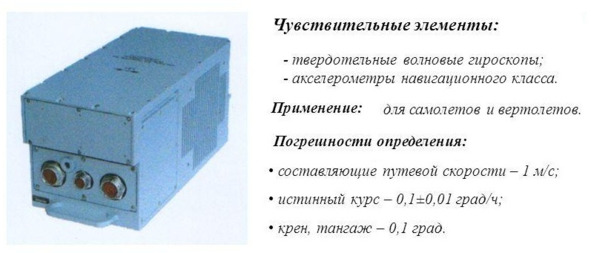
Один из вариантов конструктивного исполнения современной БИНС представлен на рис. 14.
Рис. 14. Бесплатформенная инерциальная навигационная система ТВГ-1Г
Недостатком дешёвых электромеханических БИНС является существенное увеличение погрешности счисления координат с увеличением дальности и времени плавания. Поэтому высокую точность (ошибку в несколько метров) можно достичь только используя средства внешней коррекции (GPS и ГЛОНАСС). Кроме того, они самостоятельно не входят в меридиан, как гирокомпасы.
Из этого следует, что система счисления координат для ПСД может состоять и без БИНС, только из цифрового магнитного компаса, электронного глубиномера и доплеровского лага, плюс – средства внешней коррекции, используемые при подвсплытии.
В целом, все навигационные электронные приборы второго поколения позволяют выдавать сигналы в систему автоматики ПСД и за счёт этого реализовать автоматическое управление по курсу и глубине, а также автоматический выход ПСД в заданную точку. Это значительно облегчает работу водолаза.



2.2.2. Определение места по спутниковой навигационной системе GPS/ГЛОНАСС
В 2006г. в России была создана навигационная аппаратура определения места водолаза с использованием Глобальных спутниковых навигационных систем (СНС) ГЛОНАСС и GPS – «БРИЗ-КМ-СП». (ЗАО «КБ Навис», г. Москва), рис. 15.
Аппаратура размещалась на левой руке водолаза у запястья. Для определения координат места водолаз должен был поднять руку над водой и удерживать её в таком положении не менее 30 сек.
Аппаратура выдавала координаты места водолаза без дополнительной коррекции по наземным станциям согласно таблице 3. Таблица 3.
Максимальная рабочая глубина погружения аппаратуры – 40м.
Рис. 15. Навигационный прибор водолаза системы GPS/ГЛОНАСС
Относительно большая погрешность в определении места объясняется тем, что в 2006г. система ГЛОНАСС ещё только создавалась, и количество спутников было невелико. В настоящее время система создана полностью (24 ИСЗ), и величина предельной погрешности определения места не превышает 5 – 15м в зависимости от региона. А при использовании автоматического определения аппаратурой навигационных параметров в дифференциальном режиме с учетом поправок от широкозонных дифференциальных систем (SBAS), величина предельной ошибки уменьшается до 1м. и менее.
Таким образом, задача выхода водолаза в заданную точку при использовании навигационных приборов счисления НПВ-2 или УПН-1 с периодической коррекцией места по СНС ГЛОНАСС и GPS в настоящее время успешно решена.
Однако у системы коррекции места по СНС есть и недостатки. Так необходимость водолазу подвсплывать и держать руку поднятой над водой требует непрерывной работы ластами. Это утомляет и демаскирует водолаза. Руку может накрыть волной и тогда сигнал от спутника пропадёт.
Лучше, если водолаз сможет буксировать буёк с антенной в виде штыря на гибком кабеле. При движении на ПСД это легко выполнимо.


2.2.3. Ориентация водолаза и ПСД по гидроакустическим маякам
В 80-х годах прошлого века для осуществления подводной навигации применялись активные гидроакустические системы в виде одного или нескольких гидроакустических маяков – ответчиков, установленных в районе работ (система «Экватор»). Погрешность в определении места по маякам составляла 1 – 5% от дистанции. Она зависела от гидрологии, от точности установки маяков, от глубины места. Способы определения места по гидроакустическим маякам изложены в приложении 1.
2.2.3.1. В 90-х годах в ЦНИИ «Гидроприбор» (в лаборатории Надеянского В.В) начали инициативную разрабтку и в 2002г. провёли испытания малогабаритного навигационного инерциально-гидроакусти-ческого комплекса (НИГАК) «Акватрасса». В нём используется принцип комплексирования измерений параметров движения и позиционирования водолаза, полученных измерителями различной физической природы: инерциально-гироскопической и гидроакустической. Конструктивно измерители реализуются бесплатформенной навигационной системой (БИНС) на микромеханических гироскопах и акселерометрах, гидроакустическими пеленгатором-дальномером со сверхкороткой базой и маяком-ответчиком, произвольно устанавливаемым в предполагаемой рабочей зоне водолаза (цифрового магнитного компаса в комплексе не было)
Основываясь на специальных алгоритмах вычислительной обработки результатов измерений параметров движения в бортовом компьютере (на микропроцессорных платах), определяются координаты пространственной траектории движения водолаза под водой в земной системе координат с погрешностью счисления его места относительно точки погружения не более ± 1 м при дистанции до маяка-ответчика не более 500 м. Для географической привязки к месту в состав комплекса входит приёмоизмеритель спутниковой навигационной системы США «Навстар» (GPS). Спутниковой навигационной системы «ГЛОНАСС» в России тогда ещё не было.
Макет комплекса включал в себя автономный гидроакустический маяк – ответчик и навигационный планшет водолаза, в составе которого:
– заплечный измерительный блок, включающий датчики БИНС, приёмно-излучающие антенны пеленгатора—дальномера с электронным блоком и устройство сбора аналого-цифрового преобразования и передачи информации;
– нагрудный компьютерный блок с микропроцессорными платами и дисплеем;
– поясной блок аккумуляторов.
Комплект алгоритмов и программ цифровой обработки измерительной информации включает в себя:
– программы формирования массивов измерений с адаптивным режимом квантования;
Конец ознакомительного фрагмента.
Текст предоставлен ООО «Литрес».
Прочитайте эту книгу целиком, купив полную легальную версию на Литрес.
Безопасно оплатить книгу можно банковской картой Visa, MasterCard, Maestro, со счета мобильного телефона, с платежного терминала, в салоне МТС или Связной, через PayPal, WebMoney, Яндекс.Деньги, QIWI Кошелек, бонусными картами или другим удобным Вам способом.
Приобретайте полный текст книги у нашего партнера: